Ich habe bei «#TGIQF – das kleine Python-Quiz» 140 Punkte erspielt! https://spiele.heise.de/public/gamePages/88_62/share.php?ogtitle=#TGIQF%20%E2%80%93%20das%20kleine%20Python-Quiz%20%7C%20Heise-Quiz&ogdescription=Ich%20habe%20bei%20%C2%AB#TGIQF%20%E2%80%93%20das%20kleine%20Python-Quiz%C2%BB%20140%20Punkte%20erspielt!%20Python%20ist%20%20…&ogurl=https%253A%252F%252Fwww.heise.de%252Fnewsticker%252Fmeldung%252FTGIQF-das-kleine-Python-Quiz-4325867.html
Category Archives: Software
Adding Lidar to TeddyRobot
I now got the code working for the Neato XV11 Lidar scanner, so I can add it to my TeddyRobot, and include it into the ROS NavStack.


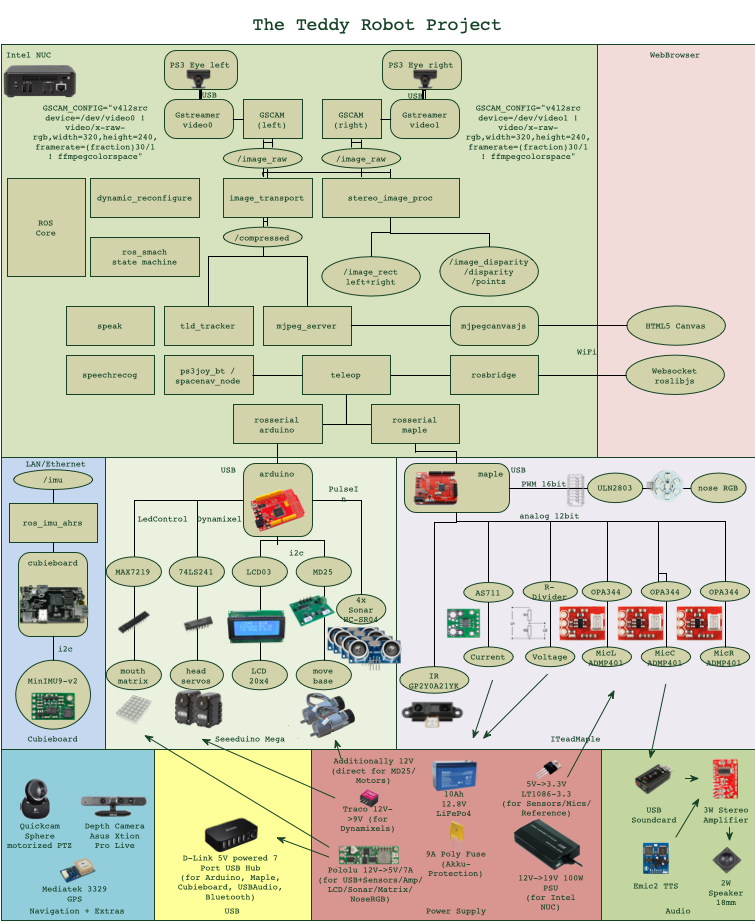
Teddy Robot Architecture Overview
Here’s how everything in ROS works together for the Teddy Robot project.
ROSCon 2016 – Seoul
This years ROSCon is held in Seoul.
http://roscon.ros.org/2016/
https://vimeo.com/search?q=roscon+2016
https://www.youtube.com/results?search_query=roscon+2016
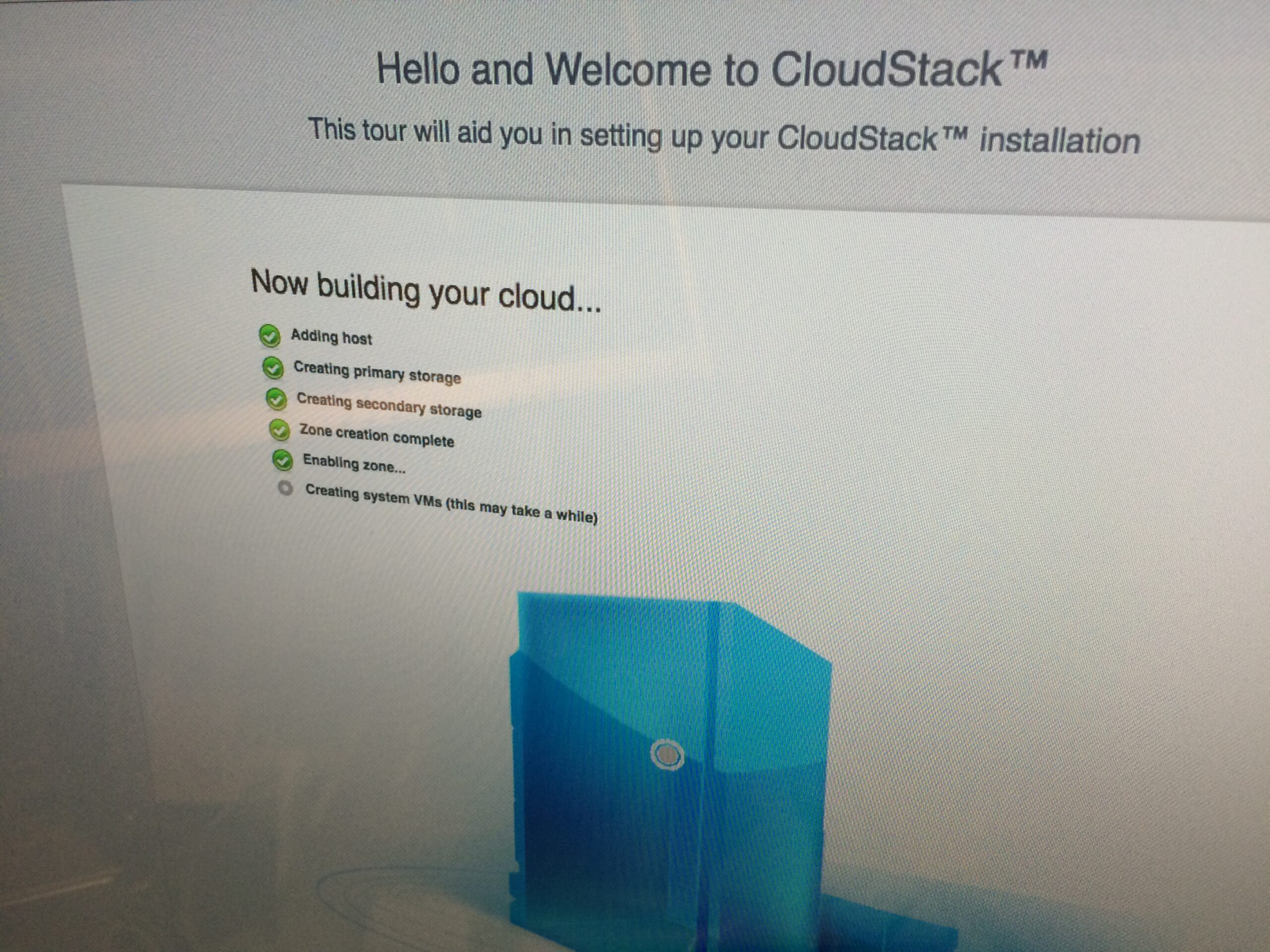
Experimenting with Apache CloudStack

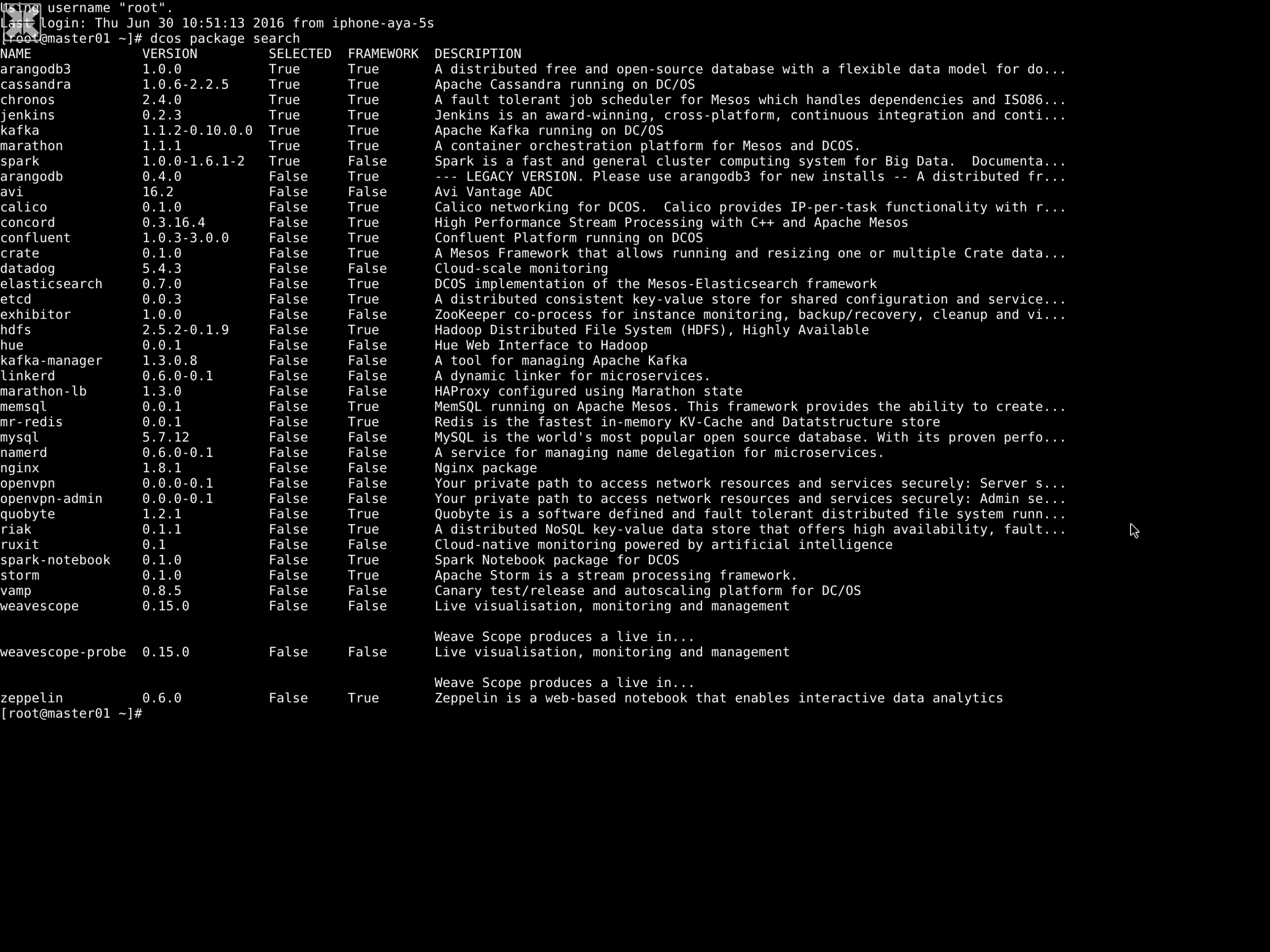
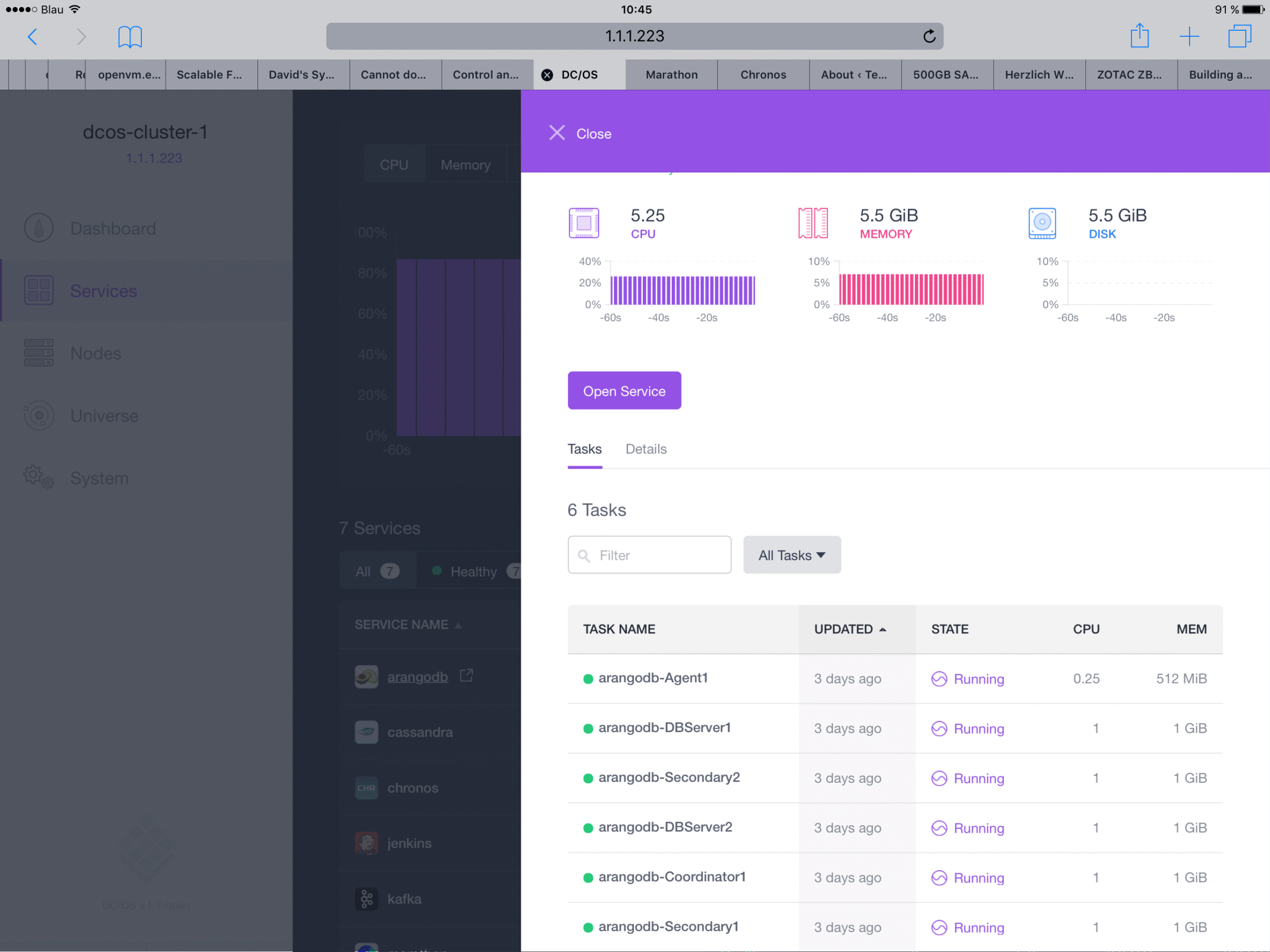
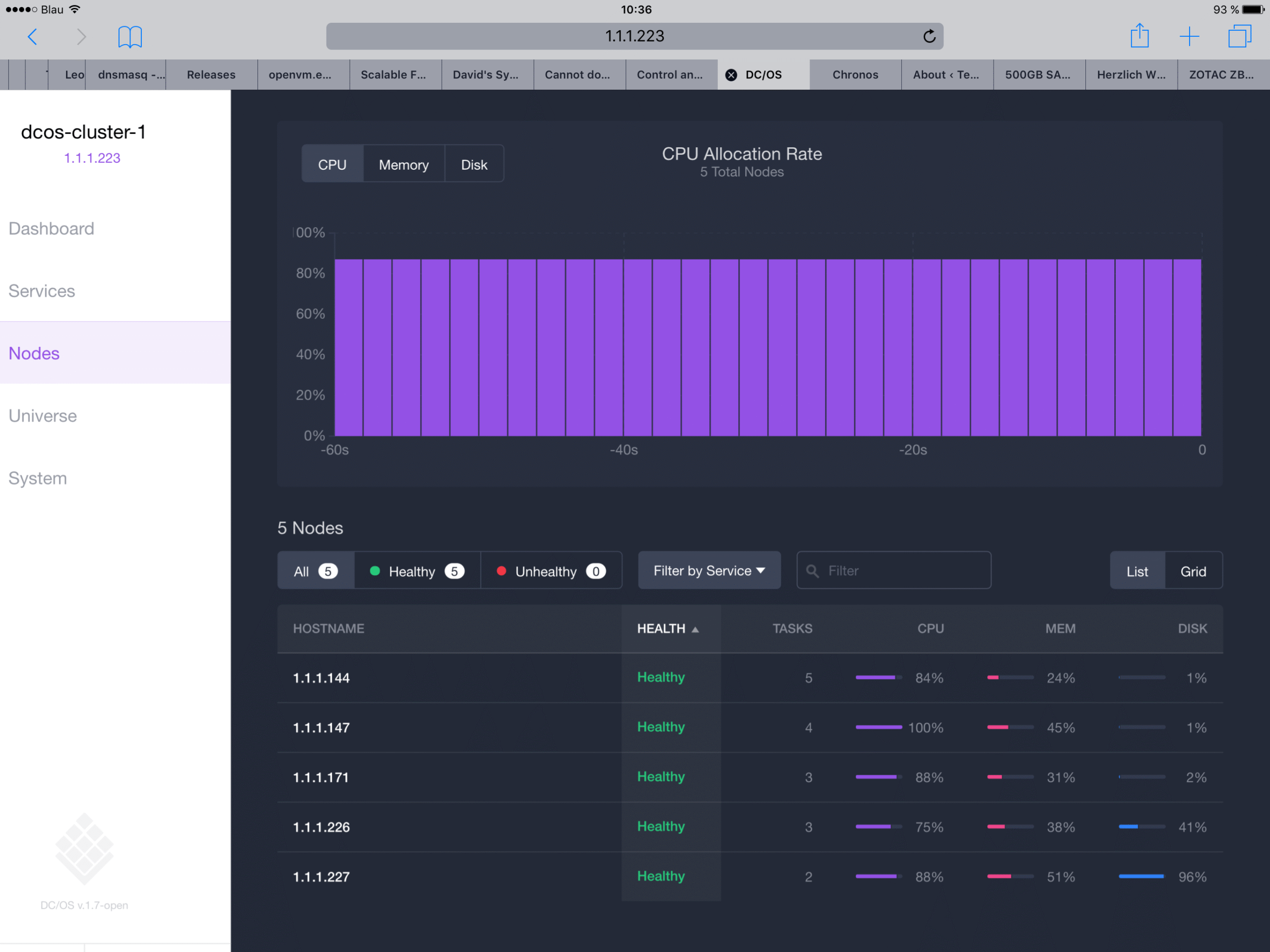
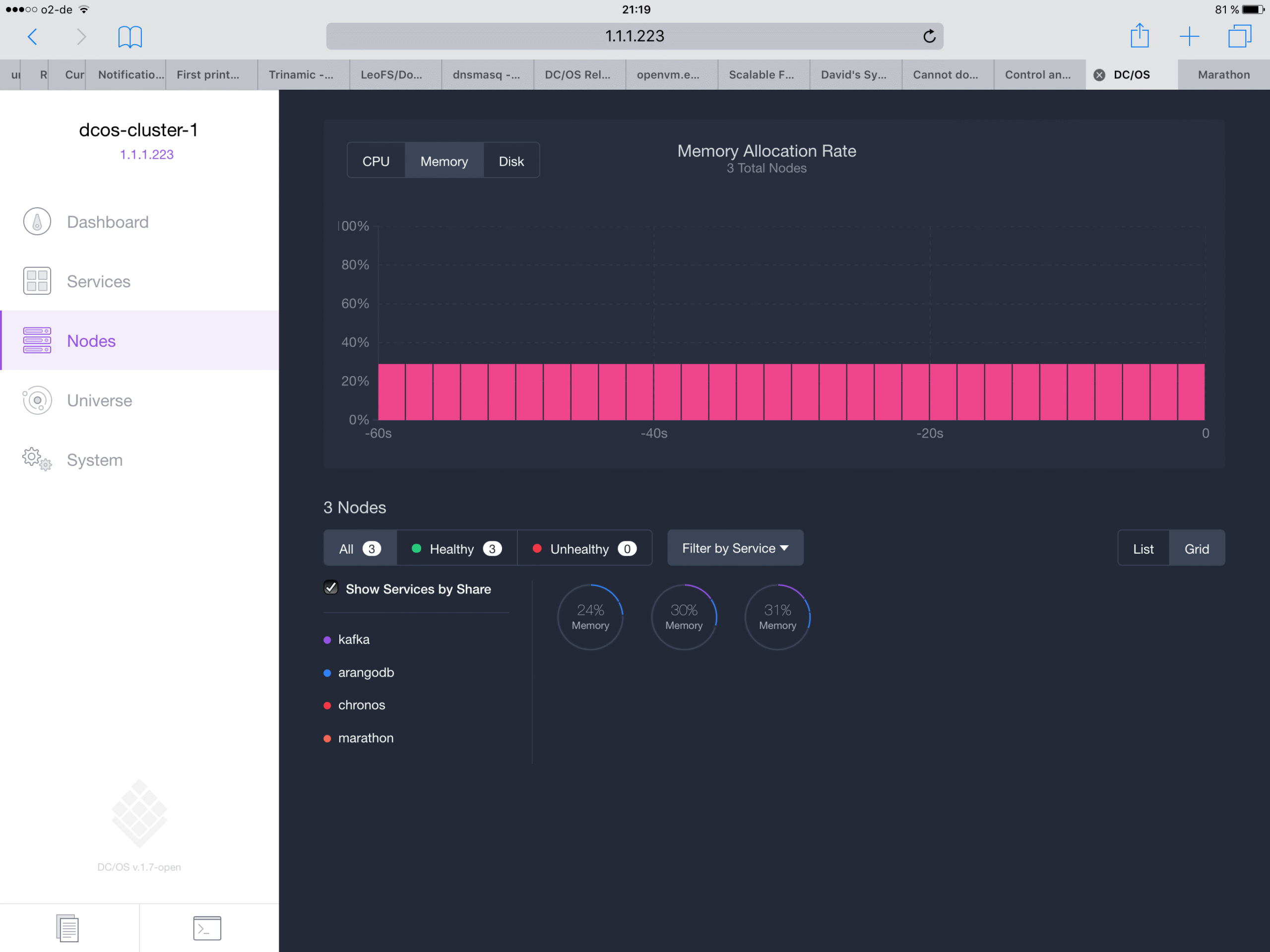
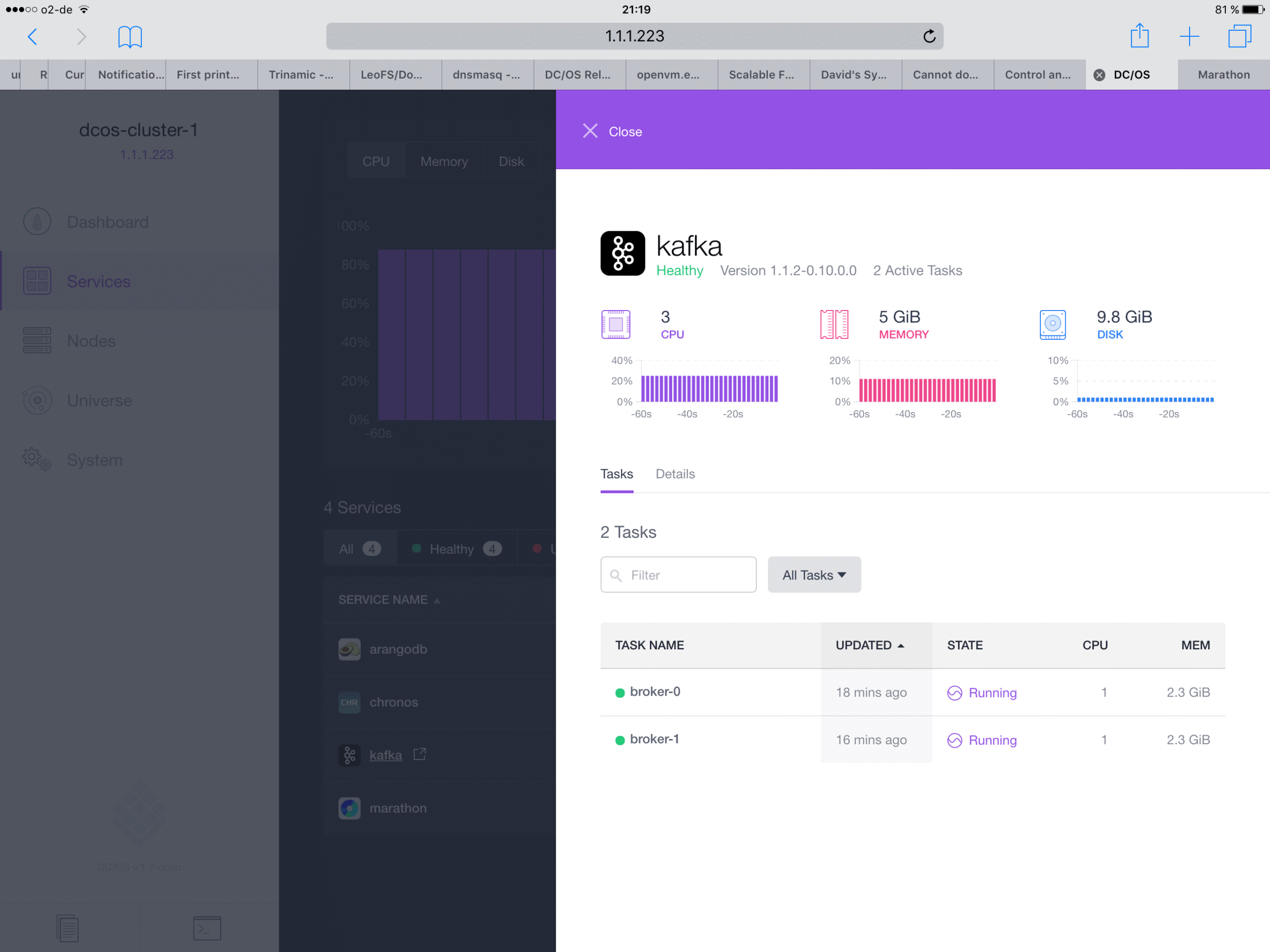
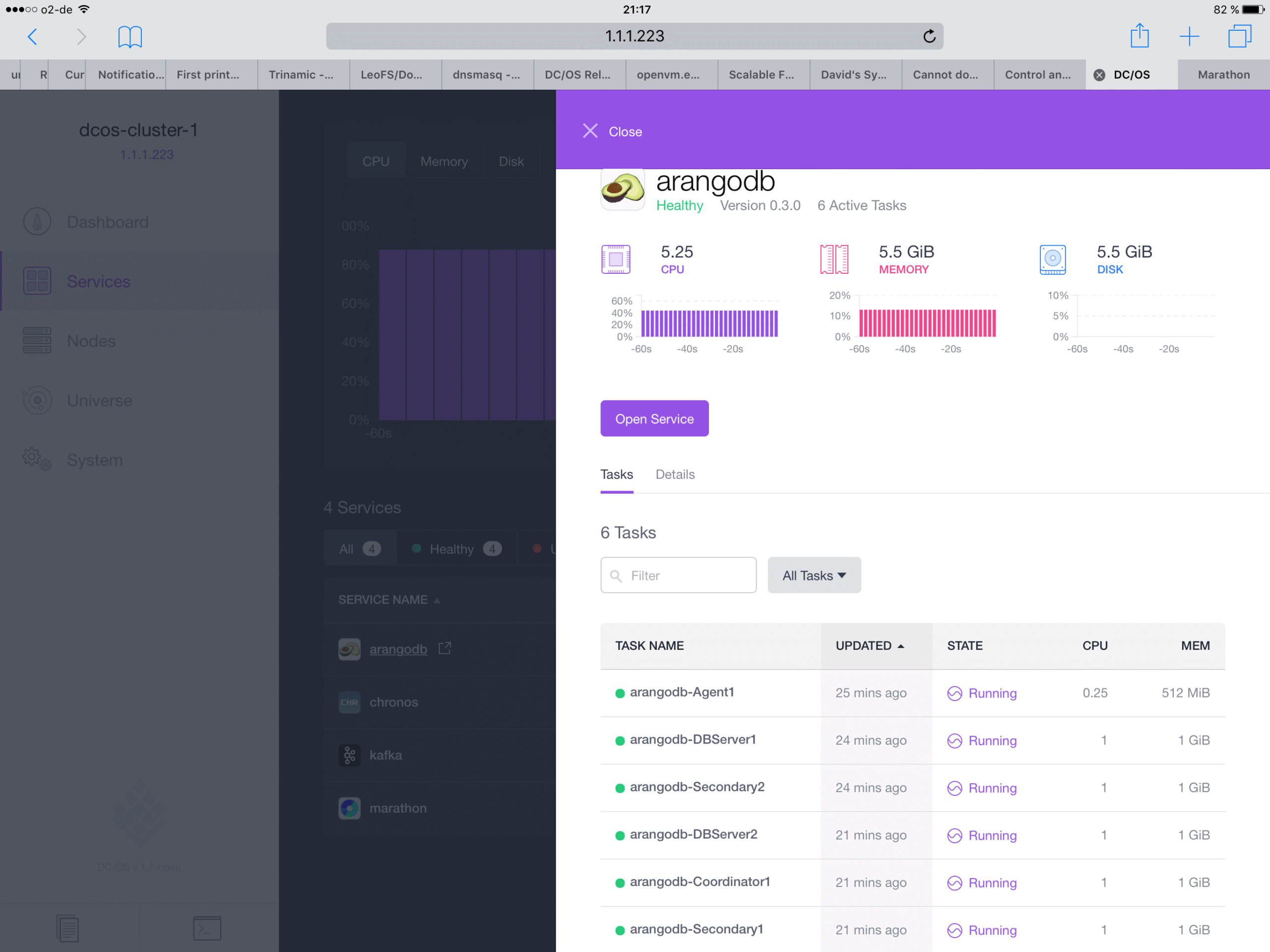
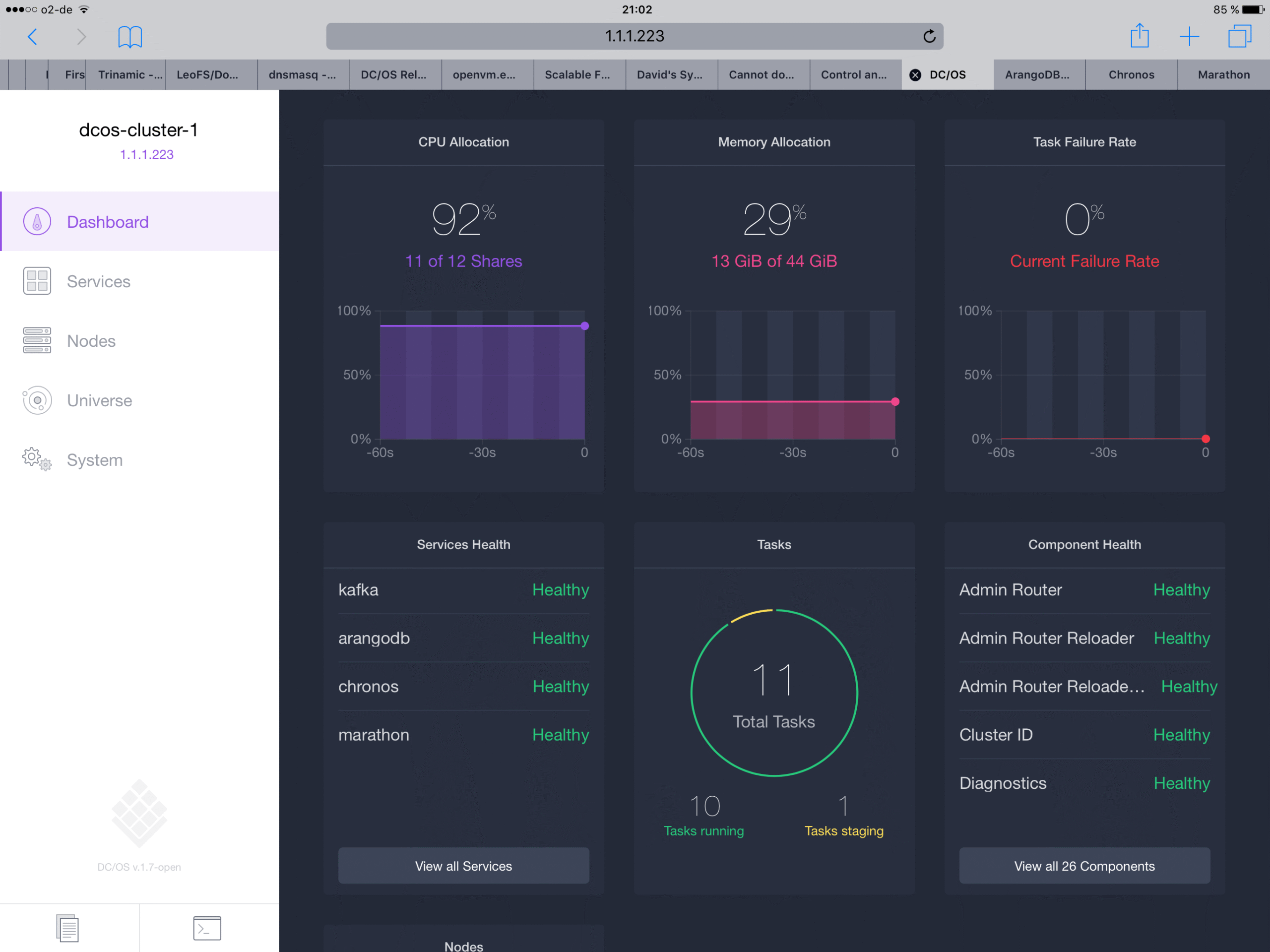
DC/OS
testing DC/OS after got it running on my CI323 devices,
USB-3 is not yet supported in those images which was a PITA
Now Marathon, Chronos, ArangoDB, Kafka are up and running.
Resource distribution is really nice.
ROSCon 2015 – Hamburg

ROSCon 2014 – Chicago
This years ROSCon is held in Chicago.

http://roscon.ros.org/2014/program/
FreeNAS 9.1.1 Upgrade
Today I upgraded my FreeNAS storage from 8.3.1 to 9.1.1 with all RAIDZ pools still alive, all new ZFS features available, no problems so far.
Further I printed lots of 90 degree makerbeam brackets, and uploaded all my design files to Thingiverse.
Configuring ROS Dynamixel controllers
Installed the ROS hydro components for the dynamixel servos, and configured the pan tilt controllers.
Software so far looks OK, now I need to re-vive the dynamixels from the arduino and hopefully the protocol CRC errors will be gone.
<launch>
<node name=”dynamixel_manager” pkg=”dynamixel_controllers” type=”controller_manager.py” required=”true” output=”screen”>
<rosparam>
namespace: dxl_manager
serial_ports:
pan_tilt_port:
port_name: “/dev/ttyACM0″
baud_rate: 57600
min_motor_id: 1
max_motor_id: 13
update_rate: 20
</rosparam>
</node>
</launch>
<launch>
<!– Load controller configuration to parameter server –>
<rosparam file=”$(find teddy_dynamixel)/config/dynamixel_joint_controllers.yaml” command=”load”/>
<!– start specified joint controllers –>
<node name=”dynamixel_controller_spawner” pkg=”dynamixel_controllers” type=”controller_spawner.py”
args=”–manager=dxl_manager
–port=pan_tilt_port
–type=simple
pan_controller
tilt_controller”
output=”screen”/>
</launch>
pan_controller:
controller:
package: dynamixel_controllers
module: joint_position_controller
type: JointPositionController
joint_name: pan_joint
joint_speed: 2.0
motor:
id: 11
init: 512
min: 0
max: 1023
tilt_controller:
controller:
package: dynamixel_controllers
module: joint_position_controller
type: JointPositionController
joint_name: tilt_joint
joint_speed: 2.0
motor:
id: 12
init: 512
min: 0
max: 1023