
building a new servo tester for the spot micro robot
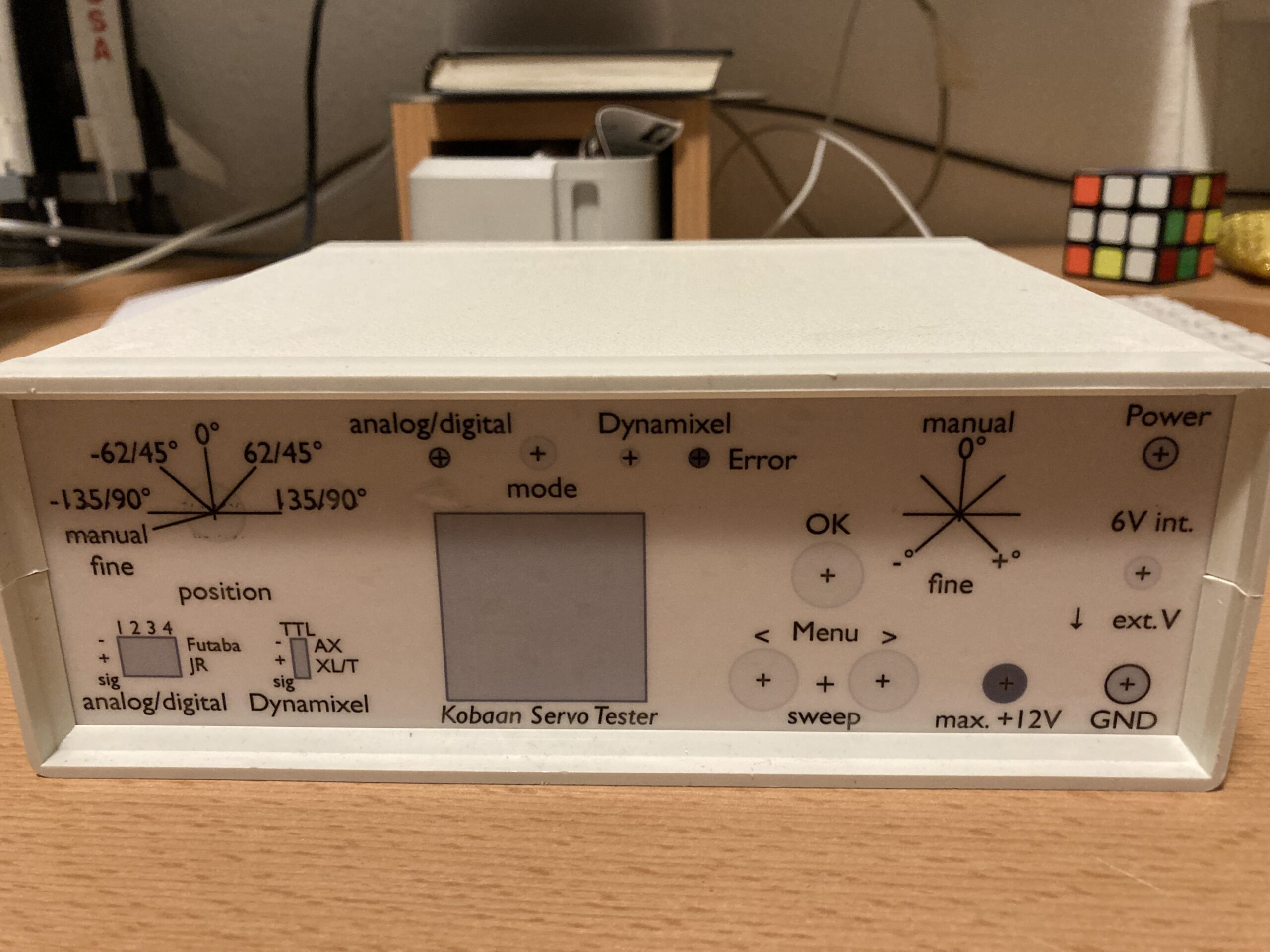
building a new servo tester for the spot micro robot
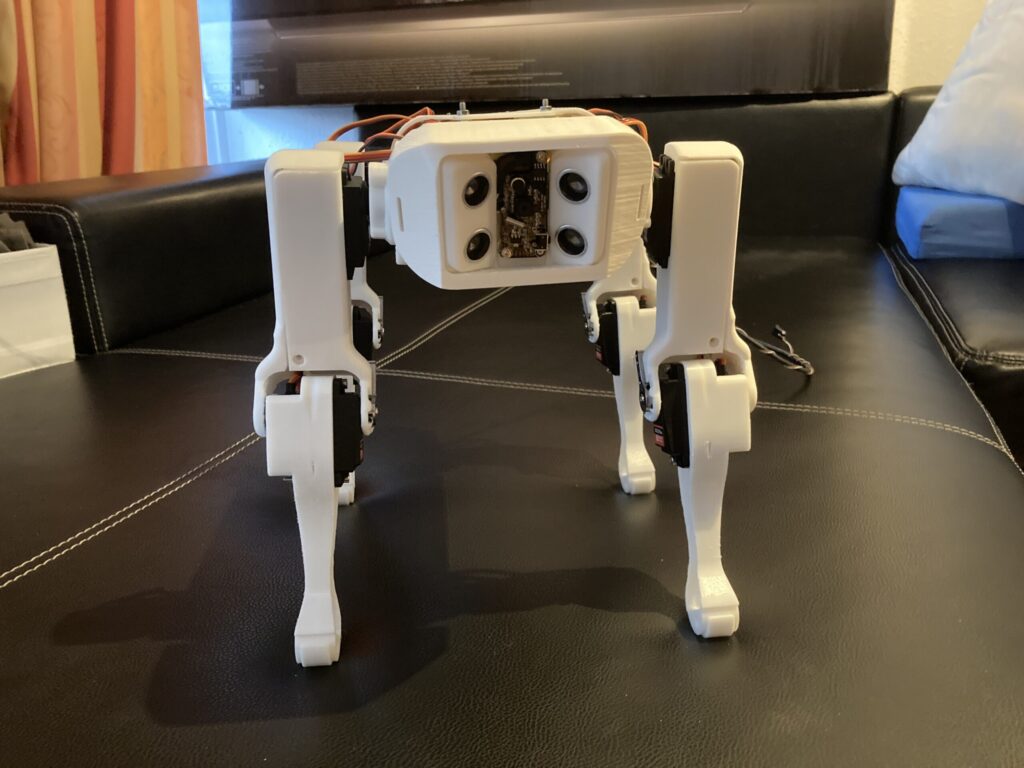
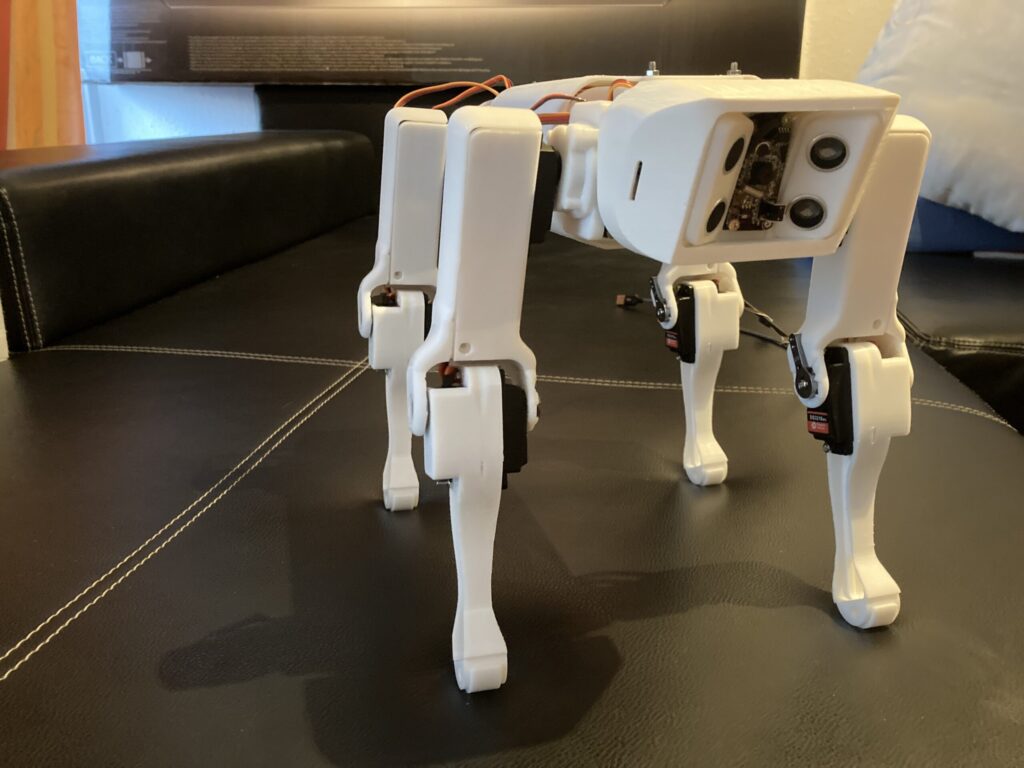
so far I only have programmed the stand and duck poses





I now got the code working for the Neato XV11 Lidar scanner, so I can add it to my TeddyRobot, and include it into the ROS NavStack.


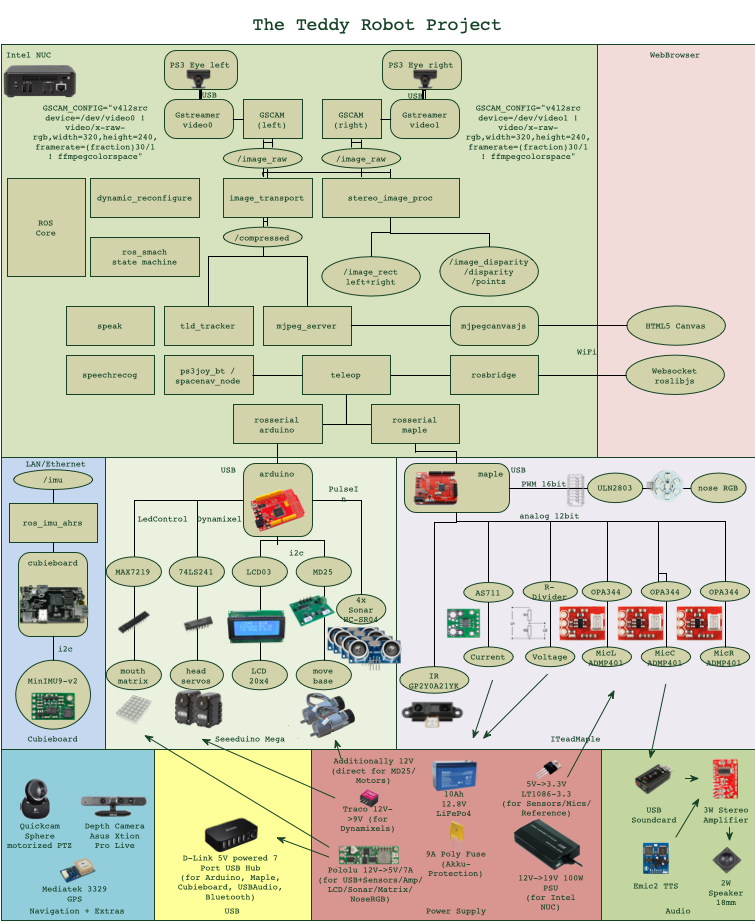
Here’s how everything in ROS works together for the Teddy Robot project.
This years ROSCon is held in Seoul.
http://roscon.ros.org/2016/
https://vimeo.com/search?q=roscon+2016
https://www.youtube.com/results?search_query=roscon+2016
This years ROSCon is held in Chicago.

http://roscon.ros.org/2014/program/
Installed the ROS hydro components for the dynamixel servos, and configured the pan tilt controllers.
Software so far looks OK, now I need to re-vive the dynamixels from the arduino and hopefully the protocol CRC errors will be gone.
<launch>
<node name=”dynamixel_manager” pkg=”dynamixel_controllers” type=”controller_manager.py” required=”true” output=”screen”>
<rosparam>
namespace: dxl_manager
serial_ports:
pan_tilt_port:
port_name: “/dev/ttyACM0″
baud_rate: 57600
min_motor_id: 1
max_motor_id: 13
update_rate: 20
</rosparam>
</node>
</launch>
<launch>
<!– Load controller configuration to parameter server –>
<rosparam file=”$(find teddy_dynamixel)/config/dynamixel_joint_controllers.yaml” command=”load”/>
<!– start specified joint controllers –>
<node name=”dynamixel_controller_spawner” pkg=”dynamixel_controllers” type=”controller_spawner.py”
args=”–manager=dxl_manager
–port=pan_tilt_port
–type=simple
pan_controller
tilt_controller”
output=”screen”/>
</launch>
pan_controller:
controller:
package: dynamixel_controllers
module: joint_position_controller
type: JointPositionController
joint_name: pan_joint
joint_speed: 2.0
motor:
id: 11
init: 512
min: 0
max: 1023
tilt_controller:
controller:
package: dynamixel_controllers
module: joint_position_controller
type: JointPositionController
joint_name: tilt_joint
joint_speed: 2.0
motor:
id: 12
init: 512
min: 0
max: 1023
Meanwhile ROS hydro has it’s own gscam modules released, so I migrated from my own compiled module and also reconfigured the topic remapping.
ptzcam.launch file:
<?xml version=”1″ encoding=”utf-8″?>
<launch>
<node pkg=”gscam” type=”gscam” name=”gscamptz” cwd=”node” respawn=”true”>
<env name=”GSCAM_CONFIG” value=”v4l2src device=/dev/video0 always-copy=false ! video/x-raw-yuv,width=320,height=240,framerate=15/1 ! ffmpegcolorspace”/>
<remap from=”camera/image_raw” to=”/camera/ptz/image_raw” />
<remap from=”camera/camera_info” to=”/camera/ptz/camera_info” />
</node>
</launch>
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
